
Mohsen Amiri
| I'm a PhD candidate in Mechanical Engineering at Washington State University and part of the SIAS Lab, advised by Dr. Mehdi Hosseinzadeh. My academic journey is centered on advancing real-world autonomy. I focus on developing control and opyimization-based methods that enable safety-crtitical systems to operate reliably in complex, uncertain environments, and validating these approaches through deployment on physical platforms. My work integrates tools from applied analysis and partial differential equations to address key challenges in autonomous decision-making and control. I implement and test these methods on a range of robotic systems, including mobile robots, quadrupeds, and aerial drones. More recently, I have been exploring human–robot interaction within the autonomy framework, with a particular emphasis on ensuring safety, efficiency, and robustness in both robot behavior and its interaction with humans. | 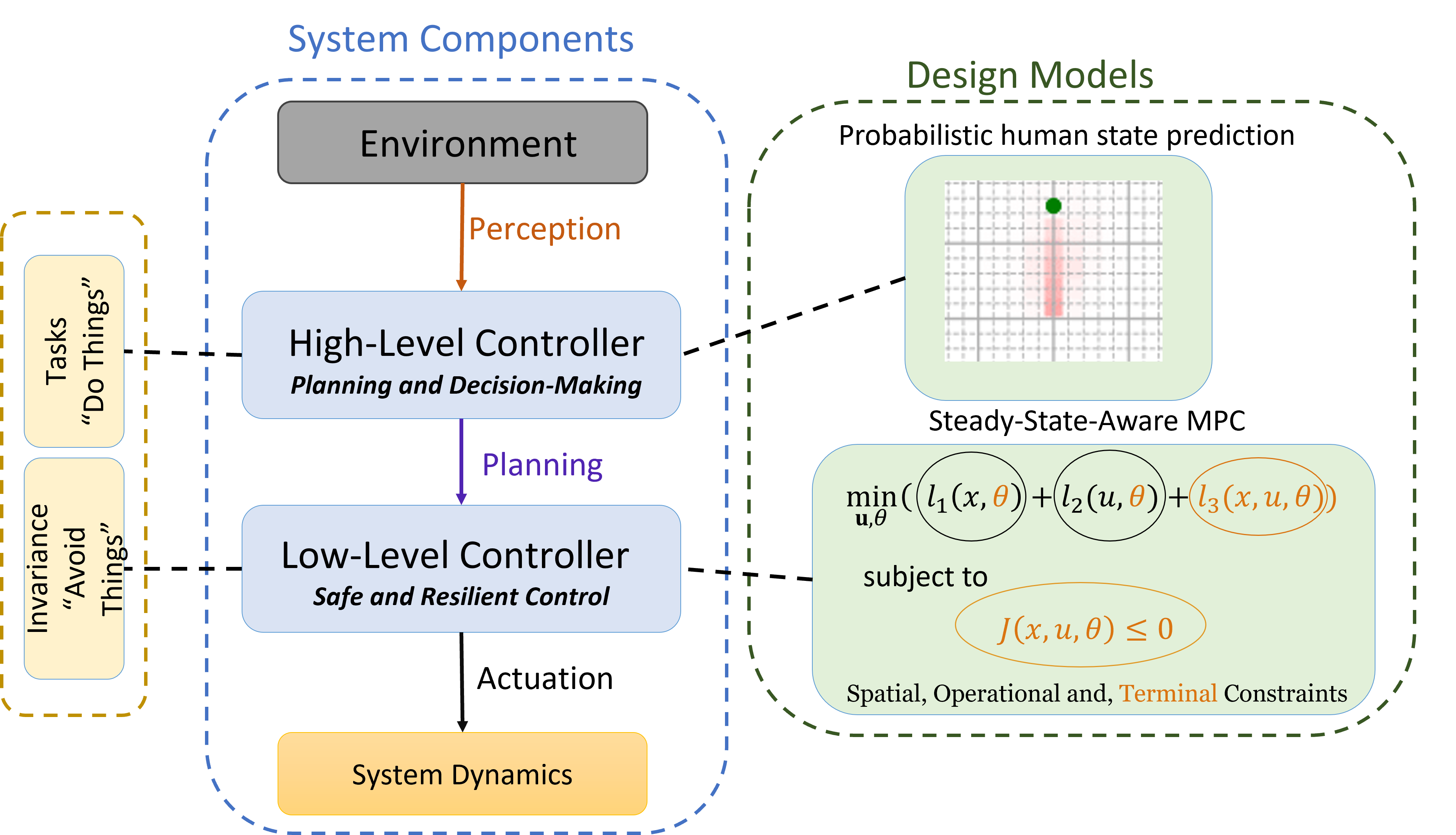 Hierarchical Control Structure |
Research:
PriPG-RL: Privileged Planner-Guided Reinforcement Learning for Partially Observable Systems with Anytime Feasible MPCM. Amiri, M. Amiri, A. Beikmohammadi, S. Magnu´sson, and M. Hosseinzadeh The 65th IEEE Conference on Decision and Control (CDC) (Under Review), 2026 [pdf] / [Github] / [video] The proposed method addresses the problem of training a reinforcement learning (RL) policy under partial observability by exploiting a privileged, anytime-feasible planner agent available exclusively during training. We propose Planner-to-Policy Soft Actor-Critic (P2P-SAC), a method that distills the planner agent’s privileged knowledge to mitigate partial observability and thereby improve both sample efficiency and final policy performance. |  |
Action Planning for Autonomous Vehicles with Hierarchical Reasoning in Adversarial Traffic InteractionsM. Amiri, K, Yazdipaz, M. Hosseinzadeh IEEE Transactions on Vehicular Technology (Under Review), 2026 [video] The proposed method addresses the challenge of autonomous vehicle (AV) navigation in adversarial scenarios where Human-Driven Vehicles (HDVs) may exhibit non-cooperative or unaware behaviors, such as forced cut-ins and right-of-way violations. We propose a game-theoretic planner based on the Level-k reasoning framework to distinguish between adversarial agents (Level-0) and strategically aware agents (Level-1). By incorporating behavior-driven danger signaling and a recursive Bayesian belief update, the AV can dynamically adapt its trajectory and signaling strategy to ensure safety and efficiency in complex, non-cooperative road interactions. |  Experimental data; Case a/b/c.3: Awareness Update. |
Safe Robot Action Planning under Human Behavioral Uncertainty with Probabilistic and Vision–Language ReasoningK, Yazdipaz, M. Amiri, M. Hosseinzadeh Advanced Intelligent Systems (Under Review), 2026 [video] The proposed action planner update the robot’s belief about human cooperation by fusing two latent attributes: Perceptual Awareness (inferred from head pose and gestures) and Navigational Responsiveness (inferred from trajectory adaptations). The framework dynamically weights these attributes based on the interaction phase to address behavioral uncertainty. |  (1).gif) Experimental data; CASE I: Aware/Responsive, CASE II: Unaware/unresponsive, CASE III: Aware/unresponsive,CASE IV: Initially Unaware/Responsive. |
Advancing Control Barrier Functions for Real-Time Complex Safety SpecificationsM. Amiri, I. Kolmanovsky, M. Hosseinzadeh IEEE (In progress), 2026 [video] We formulate the CLF-CBF-QP as a Dynamic Embedding problem, defining a virtual continuous-time system that tracks the suboptimal yet any time feasible control input in real-time. This rigorously guarantees the safety meaning that the constraints are satisfied at all times without any requirement of hessian. |  Navigation in complex environment |
CERTIS: A Computationally Efficient Model Predictive Control Framework for Resource-Constrained Safety-Critical SystemsM. Amiri, I. Kolmanovsky, M. Hosseinzadeh IEEE Transactions on Automatic Control (Under review), 2026 [video] CERTIS enables the deployment of MPC in resource-constrained, safety-critical systems, where conventional MPC often fails due to computational limitations. A key feature of CERTIS is its ability to generate feasible and sub-optimal solutions even when the available computation time is insufficient to fully solve the MPC-related optimization problem. |  (2).gif) CERTIS computational efficiency |
Safe and Efficient Robot Action Planning in the Presence of Unconcerned HumansM. Amiri, M. Hosseinzadeh IEEE American Control Conference (ACC), 2025 [pdf] / [video] This approach proposes a robot action planning scheme that provides an efficient and probabilistically safe plan for a robot interacting with an unconcerned human—someone who is either unaware of the robot's presence or unwilling to engage in ensuring safety. | .gif ) Real-time human awareness detection |
A dynamic embedding method for the real-time solution of time-varying constrained convex optimization problemsM. Amiri, I. Kolmanovsky, M. Hosseinzadeh Systems & Control Letters, 2026 [pdf] / [video] The proposed approach presents a method for solving time-varying constrained convex optimization problems in real time. The key idea is to embed the optimal solution within the internal state of a virtual dynamical system that evolves in parallel with the underlying optimization problem. |  Motion trajectory of the robot, illustrating that it closely follows the desired trajectory while avoiding obstacles. |
REAP-T: A MATLAB Toolbox for Implementing Robust-to-Early Termination MPCM. Amiri, M. Hosseinzadeh Modeling, Estimation and Control Conference (MECC), 2025 [pdf] / [Github] Named REAP-T, this toolbox is a comprehensive, user-friendly, and modular platform that enables users to explore, analyze, and customize various components of REAP for their specific applications. Notable attributes of REAP-T are: (i) utilization of built-in MATLAB functions for defining the MPC problem; (ii) an interactive and intuitive graphical user interface for parameter tuning and visualization; (iii) real-time simulation capabilities, allowing users to observe and understand the real-time behavior of their systems; and (iv) inclusion of real-world examples designed to guide users through its effective use. |  Overview of the Toolbox |
Practical considerations for implementing robust-to-early termina- tion model predictive controlM. Amiri, M. Hosseinzadeh Systems & Control Letters, 2025 [pdf] The core idea is to adaptively adjust the evolution rate of the gradient flow dynamics such that REAP’s properties are maintained when REAP computes the updates of the decision variables in discrete time. Theoretical properties of such a discrete-time implementation are proven analytically, and extensive simulation and experimental studies are provided to support our analyses. | .gif) Drone Hovering |
Closed-Loop Model Identification and MPC-based Navigation of Quadcopters: A Case Study of Parrot Bebop 2M. Amiri, M. Hosseinzadeh Modeling, Estimation and Control Conference (MECC), 2024 [pdf] / [Github] This approach introduces a linear, efficient quadrotor model that reduces complexity while maintaining performance. We developed a steady-state-aware Model Predictive Control (MPC) that ensures constraint satisfaction with low computational overhead, ideal for resource-constrained platforms. The proposed algorithms were experimentally validated and evaluated using the Parrot Bebop 2. | .gif) Project Demonstration |
Steady-State-Aware Model Predictive Control for Tracking in Systems With Limited Computing CapacityM. Amiri, M. Hosseinzadeh IEEE Control Systems Letters, 2024 [pdf] / [Video] We developed a steady-state-aware MPC that guarantees tracking of piecewise constant references and satisfaction of constraints, without requiring the desired admissible steady-state configuration and without adding extra computational load. Stability, recursive feasibility, and local infinite-horizon optimality of the proposed MPC are proven analytically. | 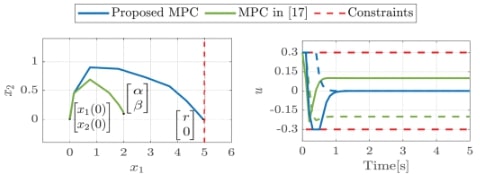 Achieved steady-state configuration with the proposed steadystate-aware MPC and MPC scheme described in the literature; in the right figure, solid line represents u1(t) and dashed line represents u2(t) |