
Projects
Optimization-Based Control in Safety-Critical Systems with Limited Computing Capacity
Publications: “Steady-State-Aware Model Predictive Control for Tracking in Systems With Limited Computing Capacity”, IEEE Control Systems Letters, 2024. “Closed-Loop Model Identification and MPC-based Navigation of Quadcopters: A Case Study of Parrot Bebop 2”, in Proc. 4th Modeling, Estimation, and Control Conference, 2024.
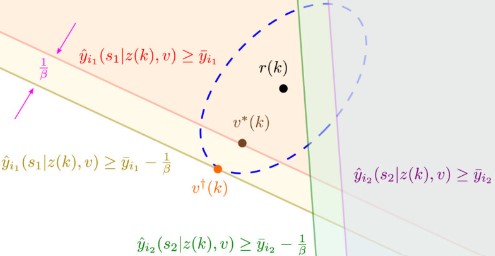
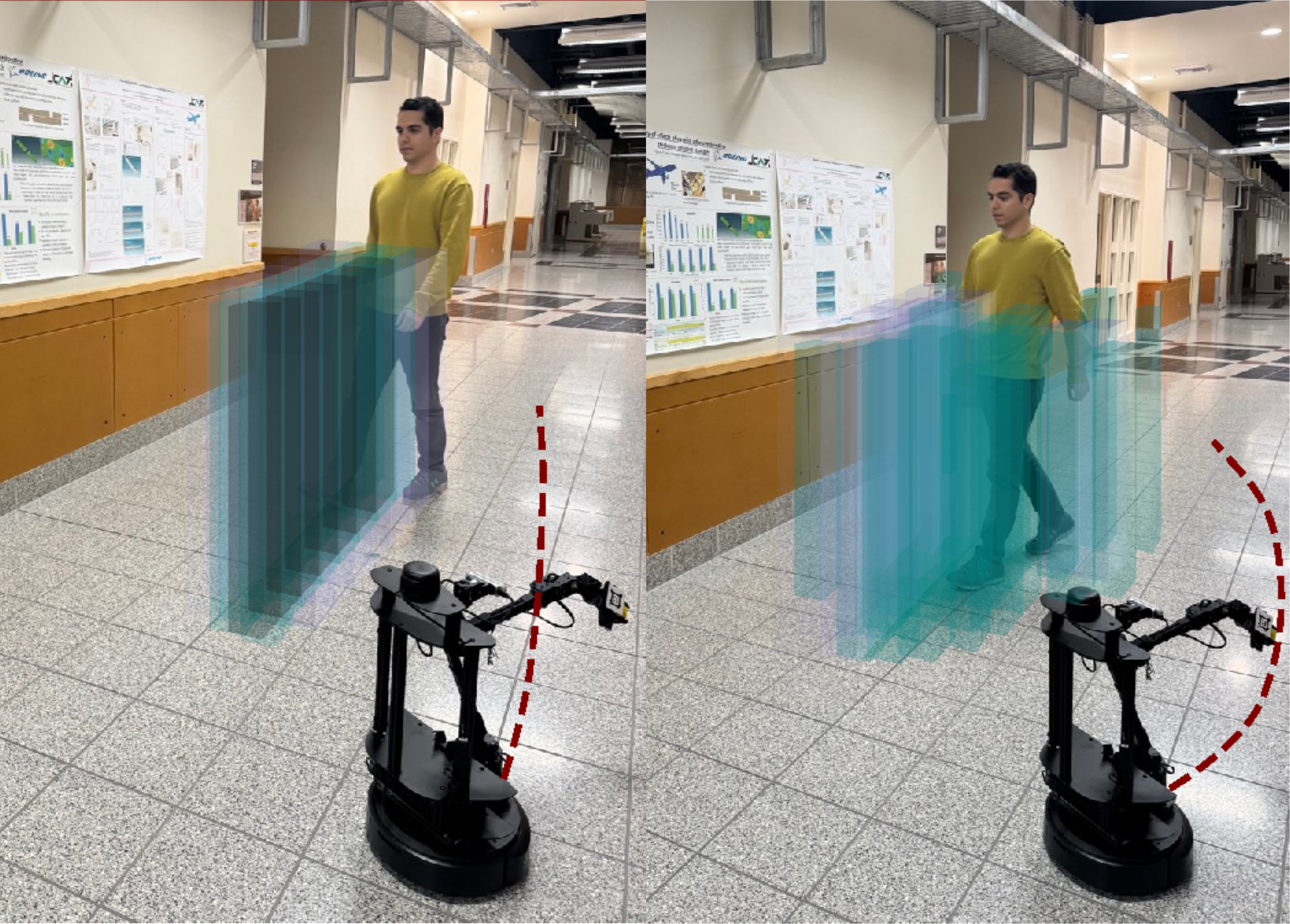
Safe and Efficient Robot Interaction Planning in the Presence of Unconcerned Human
When developing action planning for robots that interact with humans, accurately predicting human actions is essential, as humans also predict the robot’s actions in HRI environments. By taking human predictions into account, robots can improve their ability to predict human actions (left figure). Ignoring this aspect of human behavior can result in inaccurate predictions and reduced efficiency by causing the robot to deviate from its optimal path (right figure).
Closed-Loop Model Identification and MPC-based Navigation of Quadcopters: A Case Study of Parrot Bebop 2
The growing potential of quadcopters in various domains, such as aerial photography, search and rescue, and infrastructure inspection, underscores the need for real-time control under strict safety and operational constraints. This challenge is compounded by the inherent nonlinear dynamics of quadcopters and the on-board computational limitations they face. The question is how to address these challenges.
Implementation of Model-Based Controllers on Drones and Rovers in Real-World Scenarios
Implementing model-based controllers on drones and rovers within real-world scenarios through a multi-agent ROS-based remote network. Key components include establishing a network for mobile robots, implementing a human leg tracker using RPLiDar, and developing a probabilistically safe robot planner on the Locobot WX250s. Additional efforts involve creating a robust-to-early termination model predictive control strategy validated through MATLAB simulations, and deploying a steady-state-aware controller on the Parrot Bebop 2 drone. The research also integrates SLAM for navigation and mapping using lidar and depth camera technologies, aiming to enhance the performance and safety of mobile robotics.
</div>